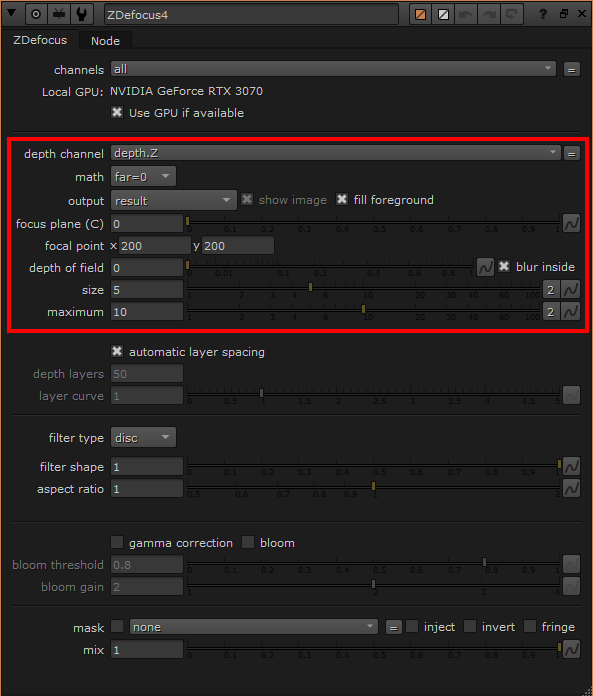
math的設置不同會有focal plane和size上的連動
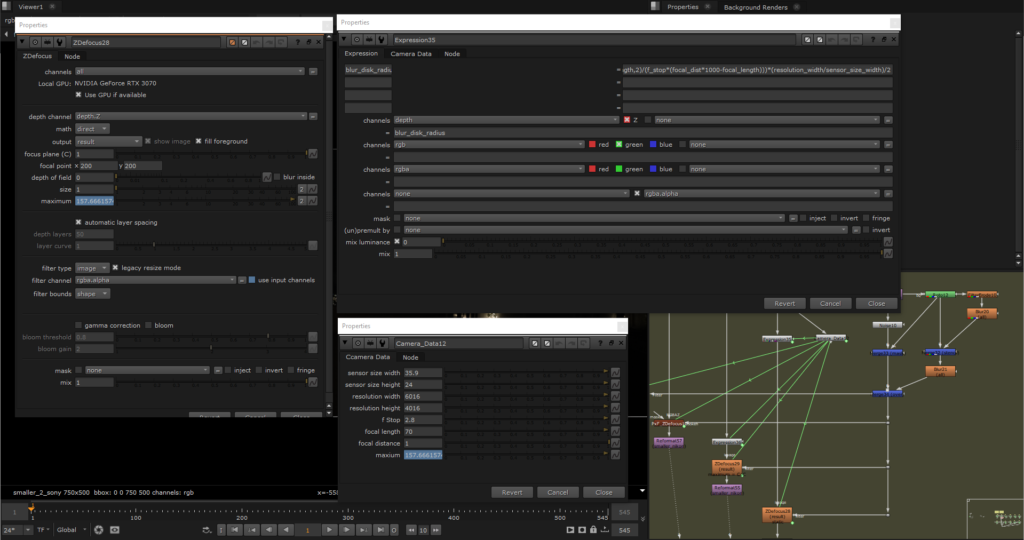
1. 把math設為direct,focal plane為1,size為1
size的官方定義: 「如果把math設為direct,size的大小會乘上depth的數值來計算失焦大小,將size固定為1可以讓你直接使用depth數值作為模糊大小」
focal plane也設定為1的原因為既然是直接depth驅動,公式裡已經把focal plane計算進去了。這個方式需要另外新增NoOp節點作為攝影機的數值基準,用公式計算新的depth channel,Copy回去主線取代舊的depth數值,把math設為direct,size設為1,根據定義就是告訴ZDefocus,對焦點在focal plane的數值位置,直接用新的depth數值作為失焦的模糊大小
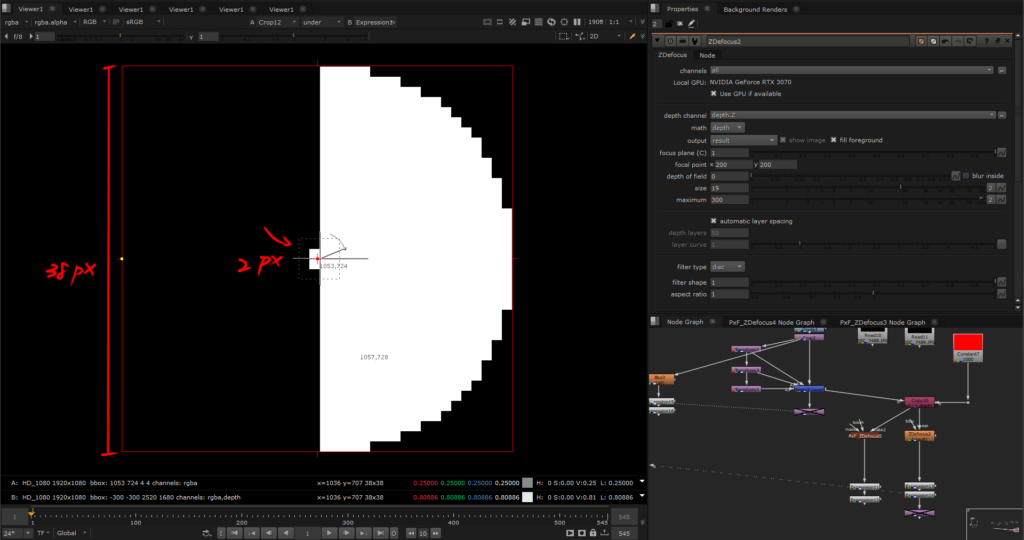
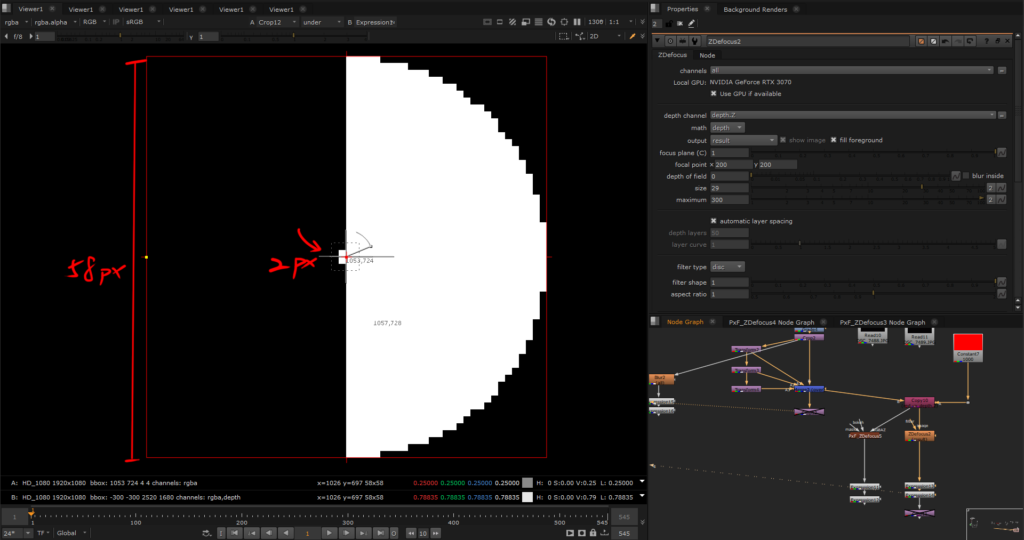
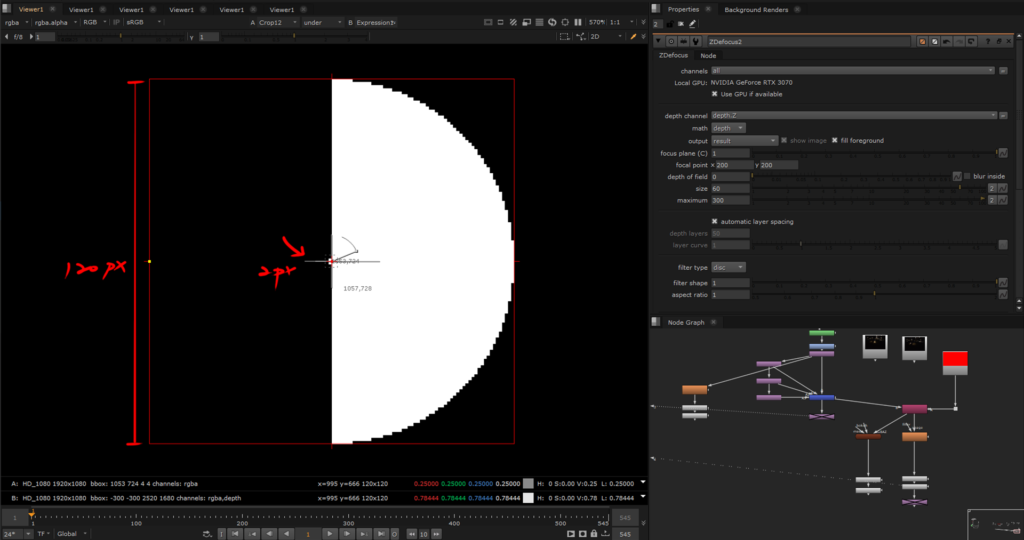
2. math設為depth,focal plane根據攝影機的實際對焦距離填入,size的欄位用公式計算後填入
兩個方式測試了下,只要攝影機資訊一致的情況下結果差不多